

Products Detail
Visual Glue-Spraying System of Outsole
Retail price
0.0
元
Market price
0.0
元
Number of views:
1000
Product serial number
Category
Other smart knitting equipment
Quantity
-
+
Stock:
Detail
Parameters
The front-end application 3D vision system automatically recognizes the highest edge of the outsoles of different sizes, and automatically generates the corresponding trajectory to send to the six-axis robot according to the actual position of the outsole. The middle section robot completes the glue spraying work, with high spraying accuracy, high speed and stable quality. The conveyor part adopts two independent conveyor belts for the generation and transmission of the outsole scan and trajectory, respectively, so that the robot can work continuously without waiting and improving the production efficiency. After the end section is equipped with an oven, the outsole can be sealed and stored directly.
1. Stable quality: Solving the problems of unstable manual brushing, easy overflowing of glue, lacking of glue and so on. Robotic sprayer is precise, efficient and stable.
2. Efficiency improvement: The identification and transmission of the vision system is synchronized with the mechanical arm spray to improve production efficiency.
3. Automatic identification: Automatically identify the outsole of different sizes, and generate the corresponding trajectory with fast recognition, accurate data and high reliability.
4. Saving process: Under the premise of ensuring sufficient adhesion, the water-based glue has no irritating odor, low pollution, and the workstation is closed. The workers do not need to directly contact the glue to effectively prevent occupational diseases.
The 3D machine vision dispensing system uses imported sensors and cameras to ensure system and equipment operation stability.
Basic parameters
| Model | Specification | Number of robot | Repart positionning | Conveyor | Degree of freedom | Productivity | Application | Voltage |
| CX-3D-01 | 2200*1900*2100mm | 1 | ±0.04mm | 2 | 6-axis | 180 prs/h |
water-based glue;
UV irradiation
|
220V |
| CX-3D-02 | 2 | 320 prs/h |
Detail display
 |
 |
 |
||
|
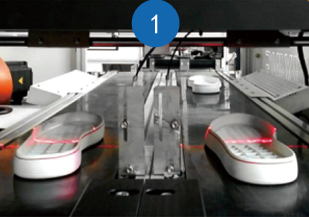
Automatic Scanning of Outsole |
Scanning Real-Time Display |
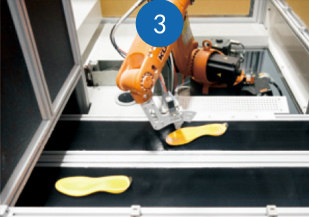
Robot Spray
|
||
|
According to different positions of the outsole, this function can be automatically identified to generate corresponding trajectory. |
The operation interface can show the actual situation of the current processing outsole, including parameters, operating status and so on. |
The front section uses the 3D vision system to automatically identify the highest edge of the outsole of different sizes, and automatically generates a corresponding trajectory to the 6-axis robot according to the its actual position. |
||
|
|
|
|
|
Previous
None
Next
TY03




Messages
Messages
Description:



